Introduction
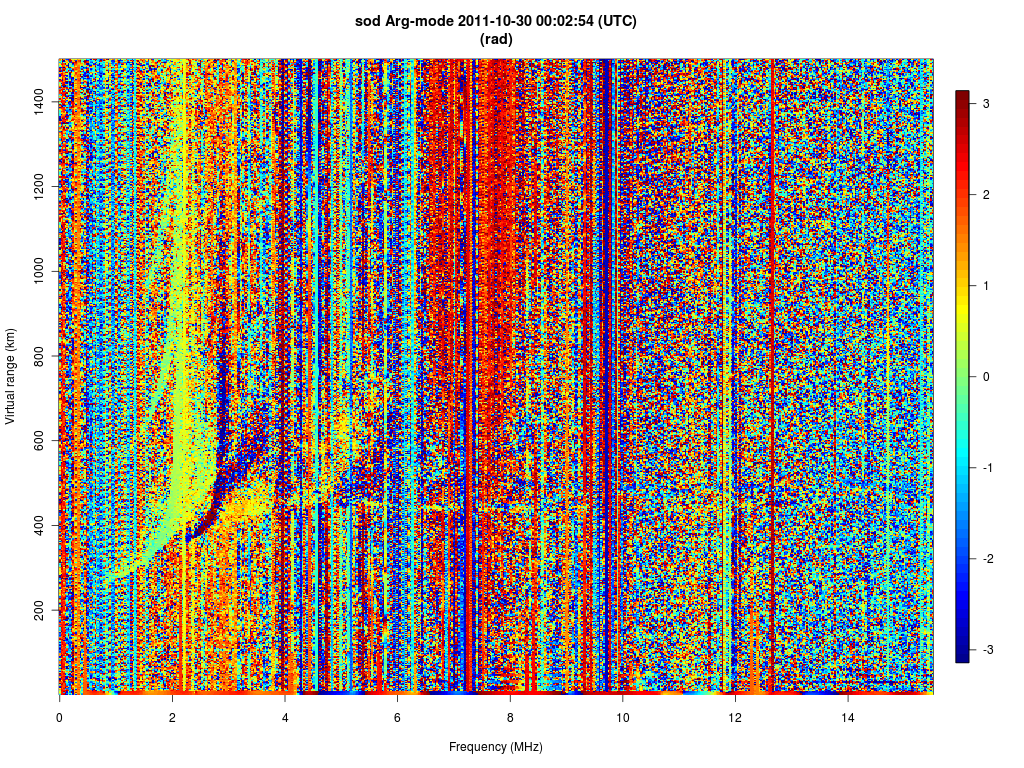
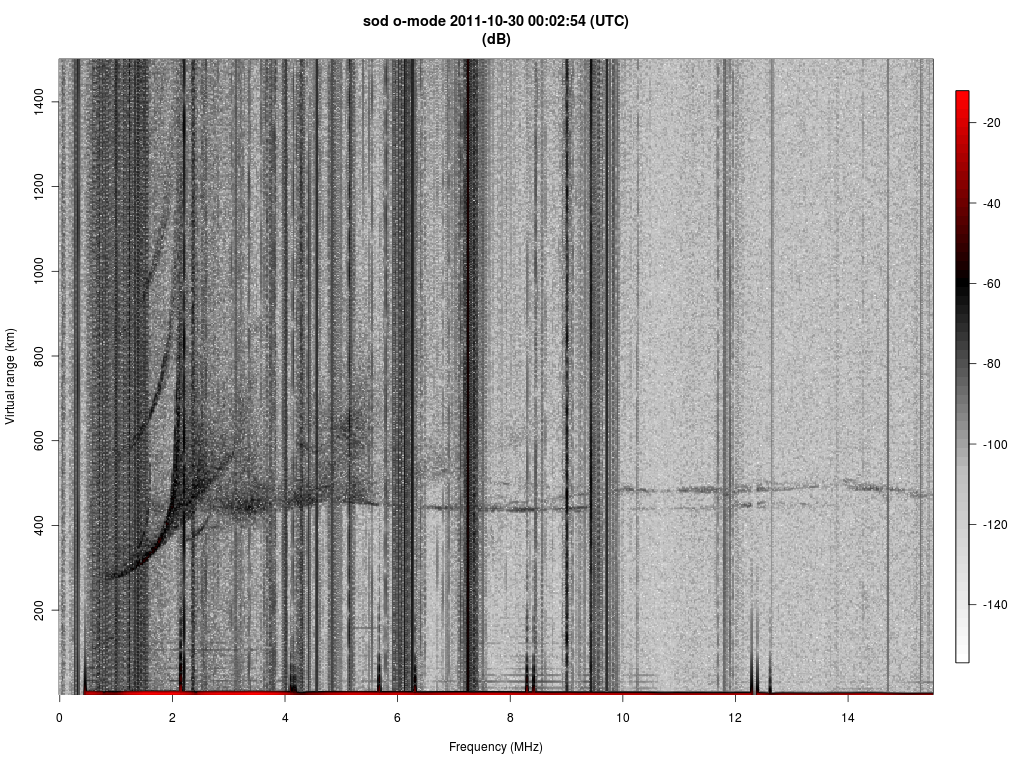
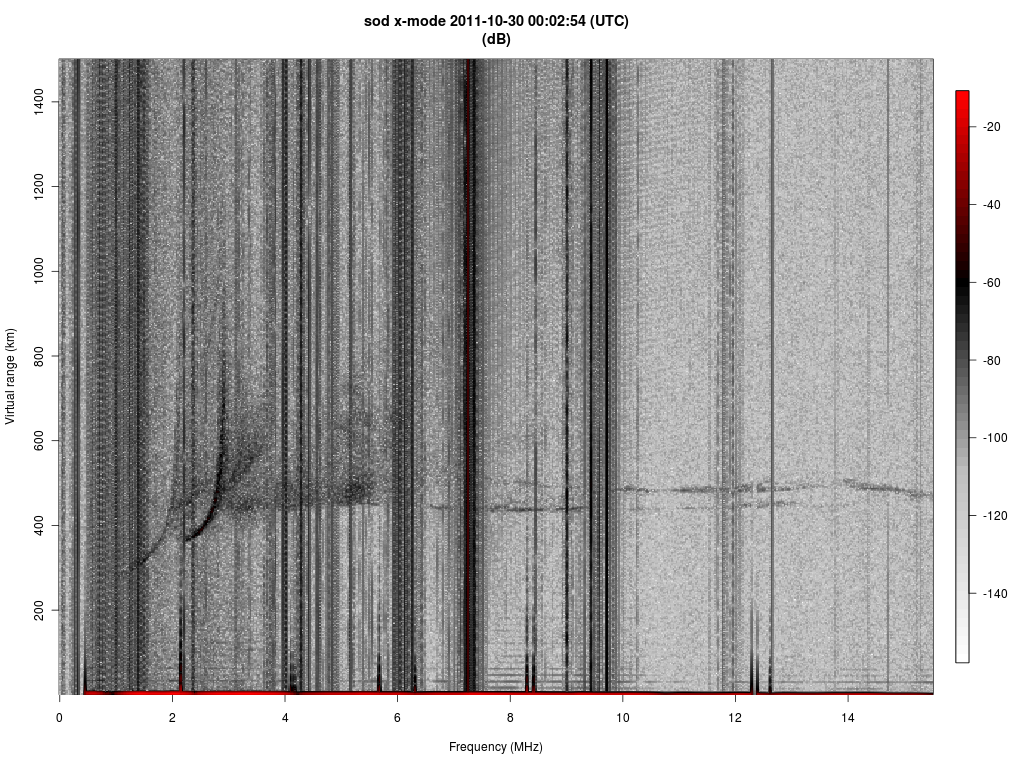
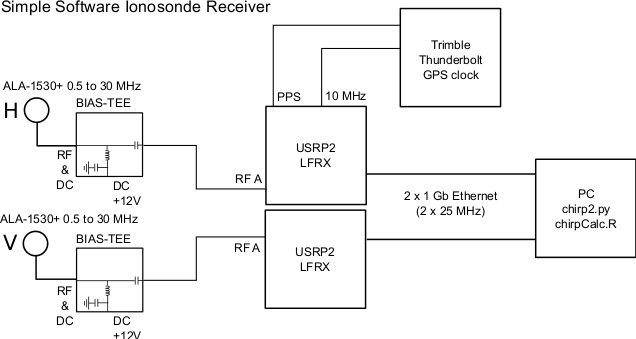
The GNU Chirp Sounder is a software defined radio based receiver for monitoring ionospheric sounders (ionosondes) and over-the-horizon radars that use linear frequency sweep FM-CW transmissions. The software is based on gnuradio and relies on Ettus research USRP2 and USRP N210 based digital receivers. The receiver can be used to receive the whole HF band (typically at 25 MHz bandwidth) simultaneously, and to receive multiple sounders simultaneously. The current receiver can be used to perform single or dual polarization (channel) soundings. The dual channel recorded can be used to determine the polarization form vertical soundings, or for angle of arrival measurements. Multiple independent receivers could also be used for imaging purposes.
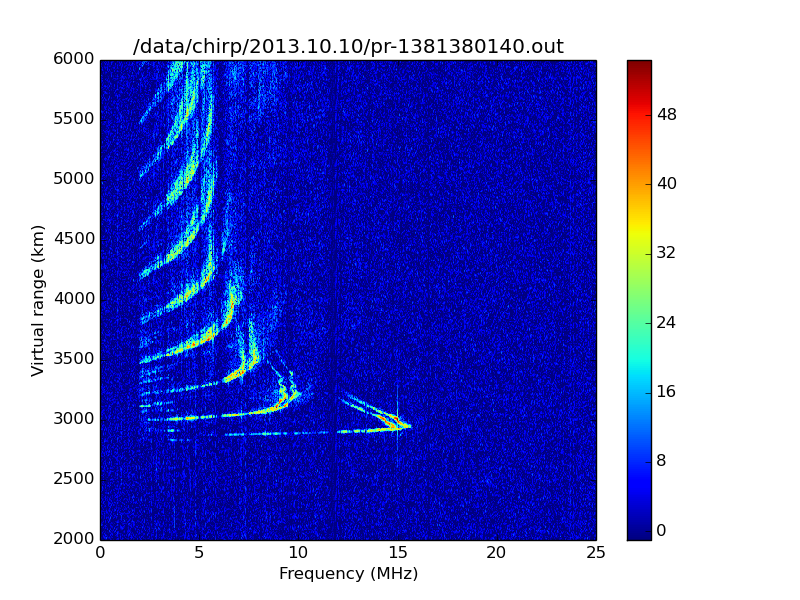
The program consists of a data recorder that performs chirp downcoversion band-pass filtering and decimation. The chirp downconversion multiplies the received signal with the undelayed analytic chirp waveform. Another program can be used to visualize the recorded data files, essentially performing a windowed spectrogram of the data file and scaling the axes correctly.